Van Nguyen Nguyen
Email: vanngn dot nguyen at gmail dot com

I am a Research Scientist at United Imaging Intelligence (UII America) in Greater Boston, MA, USA. My research lies at the intersection of 3D computer vision and robotics, with a focus on foundation models for 3D visual perception and multi-modal understanding to facilitate robotics and human modeling.
I completed my PhD at IMAGINE team, École des Ponts ParisTech, under the supervision of Prof. Vincent Lepetit, where I worked on generalizable 6D pose estimation for novel objects.
News
- 02/2026: CIF and MedGRPO accepted to CVPR 2026.
- 01/2026: Universal Beta Splatting accepted to ICLR 2026.
- 06/2025: Joined United Imaging Intelligence in Burlington, MA as a research scientist.
- 06/2025: BOP challenge 2024 report received CV4MR Best Paper Award at CVPR 2025.
- 04/2024: BOP challenge 2024 report and GoTrack accepted to CV4MR workshop at CVPR 2025.
- 12/2024: PhD defended!
- 06/2024: BOP challenge 2024 opened!
PhD thesis: Pose Estimation of Novel Rigid Objects
Supervisor: Prof. Vincent Lepetit
Reviewers: Prof. Markus Vincze, Dr. Benjamin Busam
Examiners: Prof. Josef Sivic, Prof. Dima Damen, Dr. Slobodan Ilic
Publications
All of my released code is maintained on my GitHub account.
Junyi Wu, Van Nguyen Nguyen, Benjamin Planche, Jiachen Tao, Changchang Sun, Zhongpai Gao, Zhenghao Zhao, Anwesa Choudhuri, Gengyu Zhang, Meng Zheng, Feiran Wang, Terrence Chen, Yan Yan, Ziyan Wu
CVPR 2026
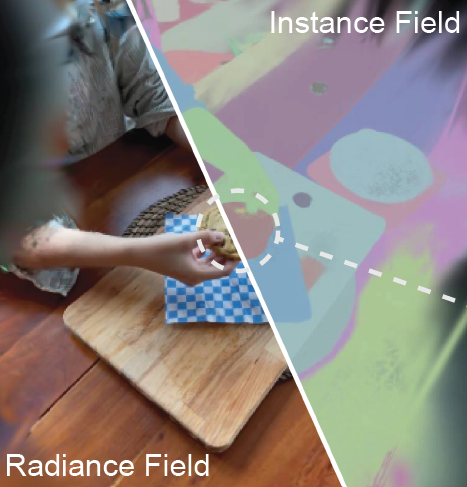
A continuous probabilistic spatio-temporal representation for dynamic scene understanding that disentangles visibility from persistent object identity. Our approach employs instance-embedded deformable 3D Gaussians that encode both radiance and semantic information, enabling novel-view panoptic segmentation and open-vocabulary 4D querying tasks.
arXiv project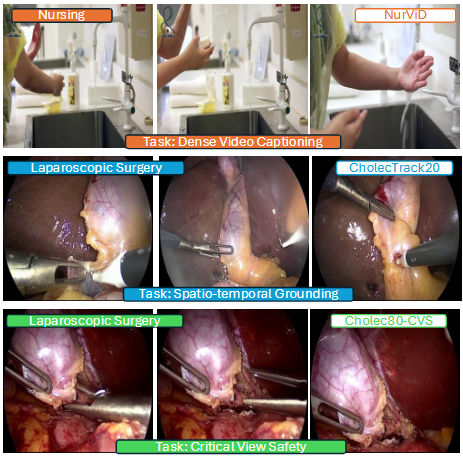
Yuhao Su, Anwesa Choudhuri, Zhongpai Gao, Benjamin Planche, Van Nguyen Nguyen, Meng Zheng, Yuhan Shen, Arun Innanje, Terrence Chen, Ehsan Elhamifar, Ziyan Wu
CVPR 2026
We introduce MedVidBench, a large-scale benchmark of 531K video-instruction pairs across 8 medical sources, and MedGRPO, an RL framework with cross-dataset reward normalization and a medical LLM judge for balanced multi-dataset training. Fine-tuning Qwen2.5-VL-7B on MedVidBench substantially outperforms GPT-4.1 and Gemini-2.5-Flash, while MedGRPO further improves grounding and captioning tasks.
arXiv project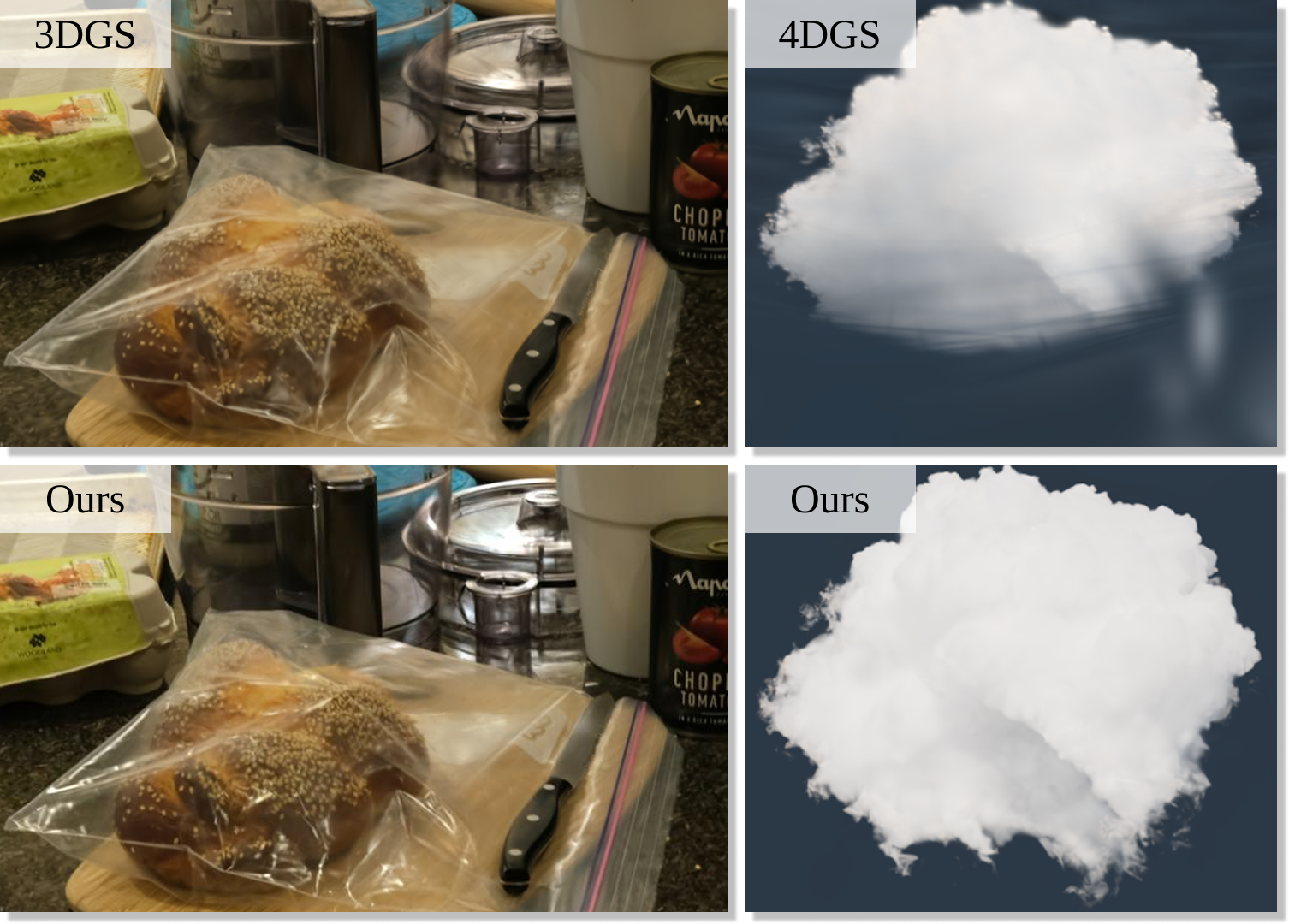
Rong Liu, Zhongpai Gao, Benjamin Planche, Meida Chen, Van Nguyen Nguyen, Meng Zheng, Anwesa Choudhuri, Terrence Chen, Yue Wang, Andrew Feng, Ziyan Wu
ICLR 2026
A unified framework that generalizes 3D Gaussian Splatting to N-dimensional anisotropic Beta kernels for explicit radiance field rendering. Beta kernels naturally decompose scene properties into interpretable components (surface vs. texture, diffuse vs. specular, static vs. dynamic) without explicit supervision.
arXiv project code

Van Nguyen Nguyen, Stephen Tyree, Andrew Guo, Médéric Fourmy, Anas Gouda, Taeyeop Lee, Sungphill Moon, Hyeontae Son, Lukas Ranftl, Jonathan Tremblay, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Stan Birchfield, Jiri Matas, Yann Labbé, Martin Sundermeyer, Tomáš Hodaň
CVPRW 2025 (CV4MR Best Paper Award)
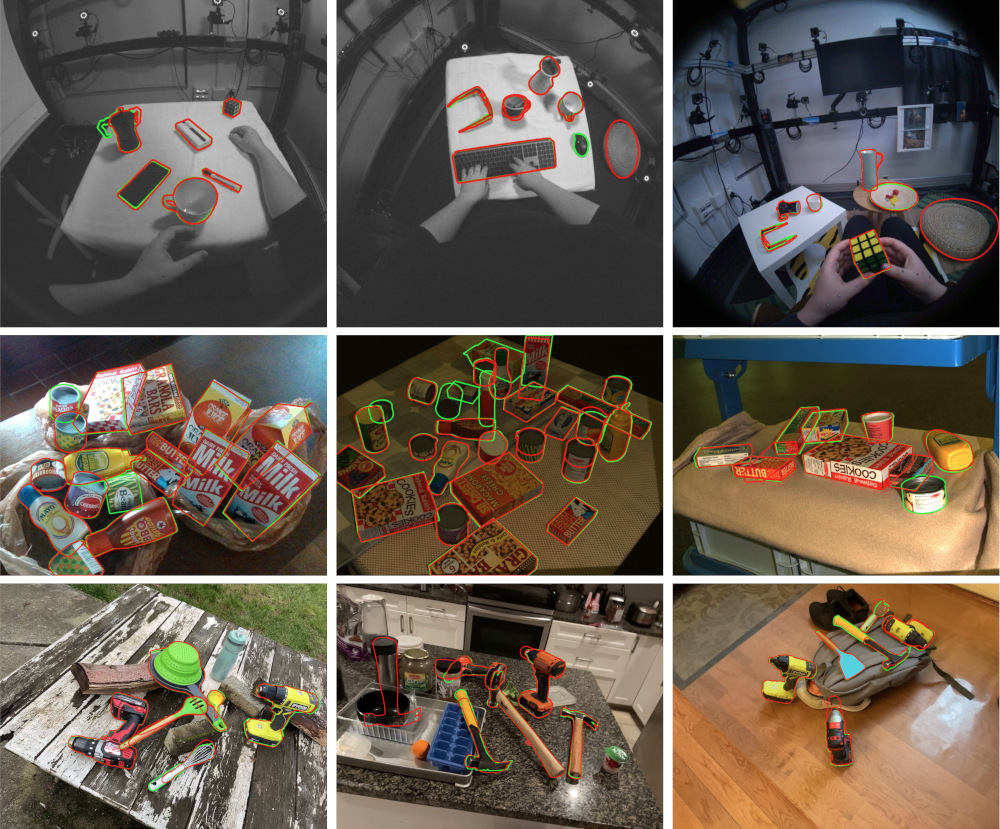
The report of BOP Challenge 2024 on model-based and model-free 2D/6D object detection on BOP-Classic and new BOP-H3 datasets (HOT3D, HOPEv2, HANDAL).
arXiv project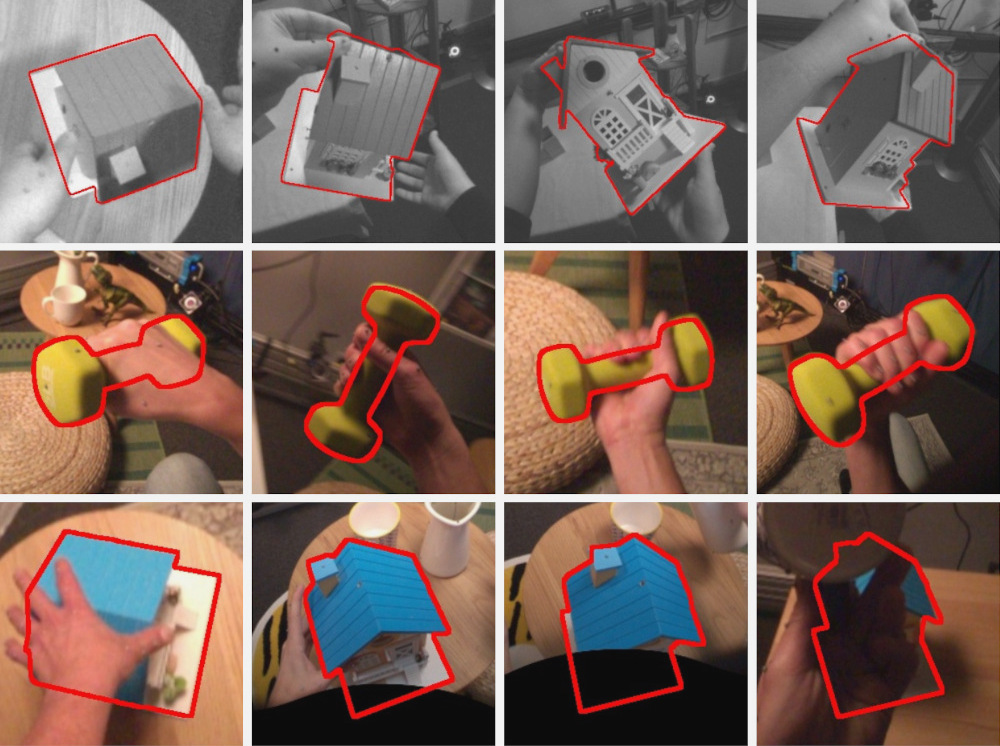
Van Nguyen Nguyen, Christian Forster, Sindi Shkodrani, Bugra Tekin, Vincent Lepetit, Cem Keskin, Vincent Lepetit, Tomáš Hodaň
CVPRW 2025
An efficient and accurate CAD-based method for 6DoF pose refinement and tracking of unseen objects. Given a CAD model of an object, an RGB image with known intrinsics that shows the object in an unknown pose, and an initial object pose, Gotrack refines the object pose such as the 2D projection of the model aligns closely with the object’s appearance in the image.
arXiv code

Tomas Hodan, Martin Sundermeyer, Yann Labbé, Van Nguyen Nguyen, Gu Wang, Eric Brachmann, Bertram Drost, Vincent Lepetit, Carsten Rother, Jiri Matas
CVPRW 2024
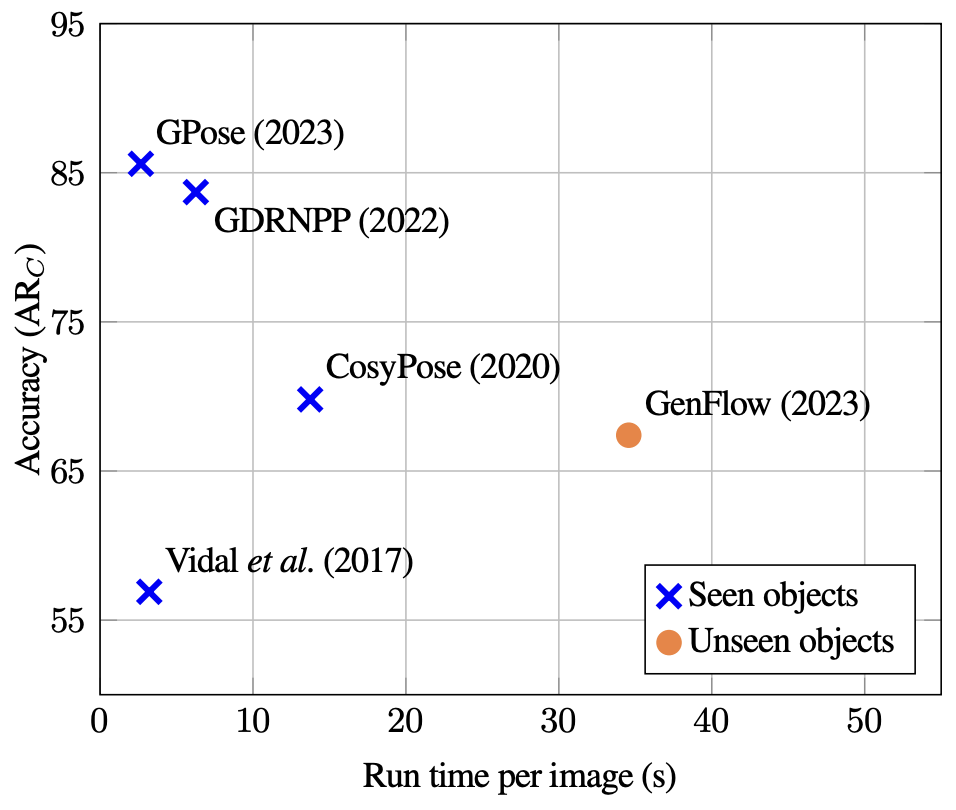
The report of BOP Challenge 2023 on state-of-the-art methods for seen and unseen object pose estimation.
arXiv project
Van Nguyen Nguyen, Thibault Groueix, Mathieu Salzmann, Vincent Lepetit
CVPR 2024
A “hybrid” template-patch correspondence approach that is fast, robust, and more accurate to estimate 6D pose of novel objects in RGB images. GigaPose predicts 6D object pose from a single 2D-to-2D correspondence.
arXiv code

Van Nguyen Nguyen, Thibault Groueix, Georgy Ponimatkin, Yinlin Hu, Renaud Marlet, Mathieu Salzmann, Vincent Lepetit
CVPR 2024
A method that can estimate relative pose of unseen objects given only a single reference image. It also predicts 3D pose distribution which can be used to address pose ambiguities due to symmetries.
arXiv code

Guillaume Astruc, Nicolas Dufour, Ioannis Siglidis, Constantin Aronssohn, Nacim Bouia, Stephanie Fu, Romain Loiseau, Van Nguyen Nguyen, Charles Raude, Elliot Vincent, Lintao Xu, Hongyu Zhou, Loic Landrieu
CVPR 2024
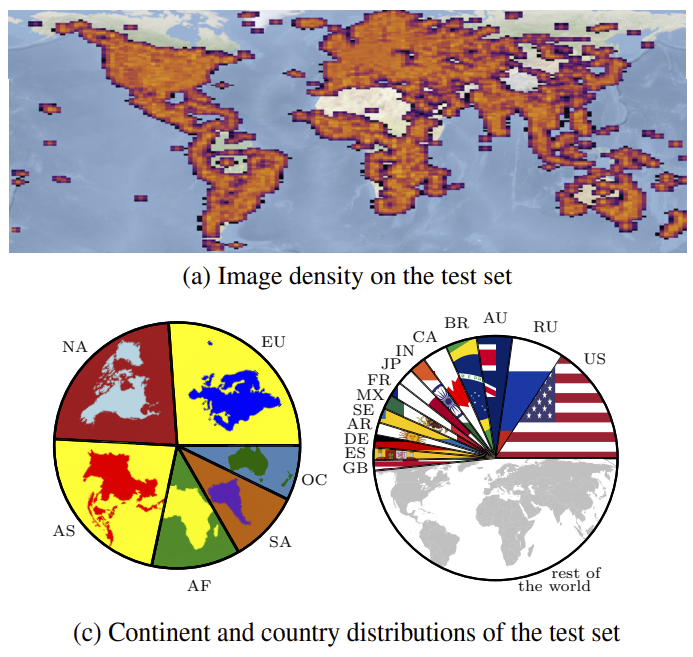
A new benchmark for visual geolocation (~Geoguessr).
arXiv code


Van Nguyen Nguyen, Thibault Groueix, Georgy Ponimatkin, Vincent Lepetit, Tomáš Hodaň
ICCVW 2023 (R6D Best Method Award for 2D detection of unseen objects)
A method that can segment novel objects for a given RGB image from only their CAD models. Based on Segmenting Anything, DINOv2, CNOS is a strong baseline for Task 5 and 6 in the BOP challenge 2023.
arXiv code

Van Nguyen Nguyen+, Yuming Du+, Yang Xiao, Michaël Ramamonjisoa, Vincent Lepetit
3DV (Oral)
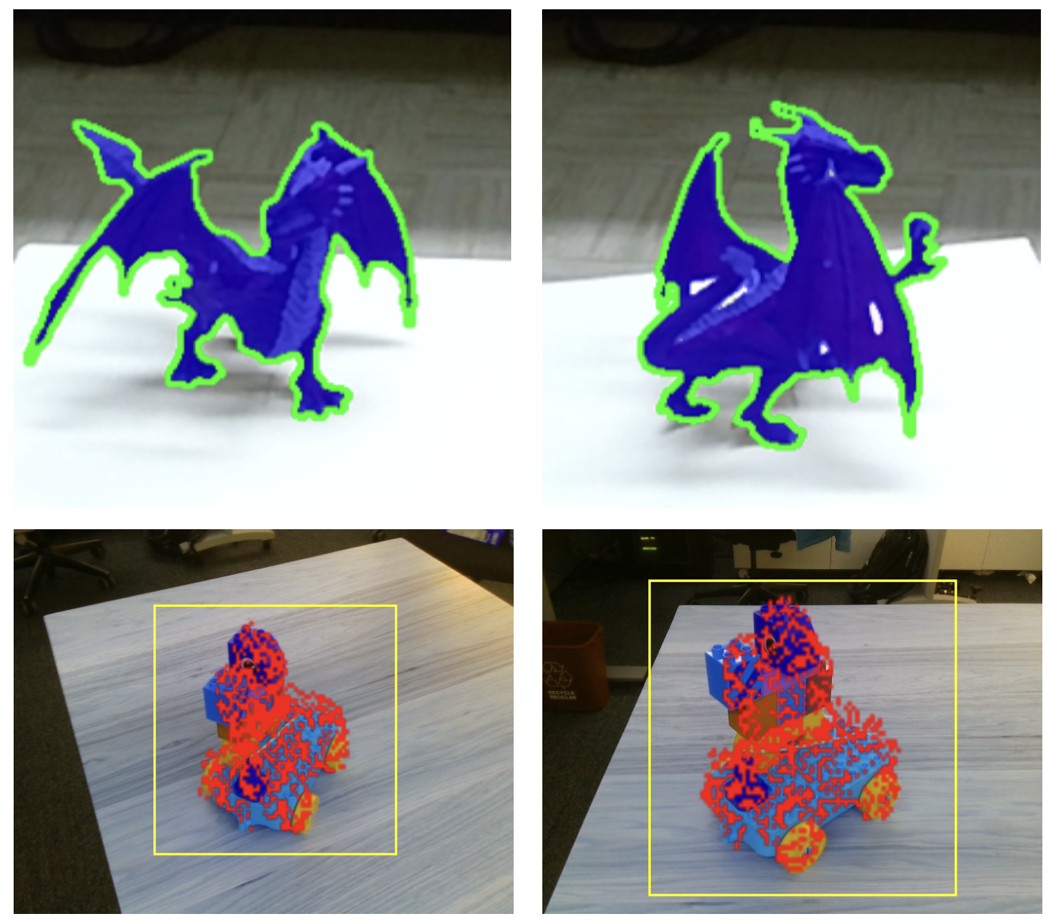
A method for tracking the 6D motion of objects in RGB video sequences when neither training images nor even the 3D geometry of the objects is available.
arXiv code

Van Nguyen Nguyen, Yinlin Hu, Yang Xiao, Mathieu Salzmann, Vincent Lepetit
CVPR 2022
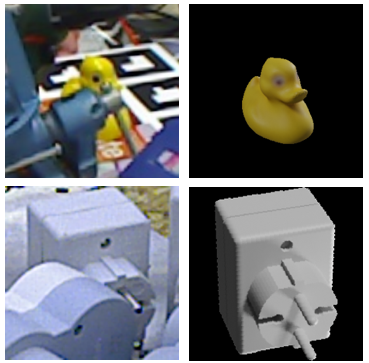
A method that can recognize objects and estimate their 3D pose in color images even under partial occlusions. Our method requires neither a training phase on these objects nor real images depicting them, only their CAD models.
arXiv code

Industrial Experience
Research Scientist
06/2025 – Present
Research Intern
06/2024 – 02/2025
05/2022 – 10/2022
Research Intern
02/2019 – 07/2019
Research Intern
07/2018 – 09/2018
Service
Reviewing: CVPR, ICCV, ECCV, NeurIPS, ICRA, IROS, RA-L, TPAMI, 3DV, ACCV, BMVC
Teaching: Image Processing and Artificial Vision (1st Master level) at ENPC, France in 2021, 2022
Workshop & Challenge:
- R6D Workshop: 9th edition at ECCV 2024
- BOP Challenges: 2025 edition, 2024 edition, 2023 edition